Published on 22/05/2025
Beyond Point Clouds: Choosing the Right 3D Representation for Cultural Heritage
When working with 3D data, especially in cultural heritage and geospatial contexts, we’re often faced with a critical decision: Do we present raw, high-fidelity point clouds that capture the world as it is, or do we clean them up into simplified, more digestible models for the audience? Or perhaps we’re only interested in the visualization purposes, to make it as close to what a natural scene would be? It raises deeper questions about truth, clarity, purpose, and preservation. In this article, I’m going to showcase a representation of a historic temple, through the lens of point cloud, mesh, and gaussian splats. The visualizations in this webpage is done through different tools: Potree, Google Model Viewer, and Mark Kellog’s 3D Gaussian Splatting viewer.
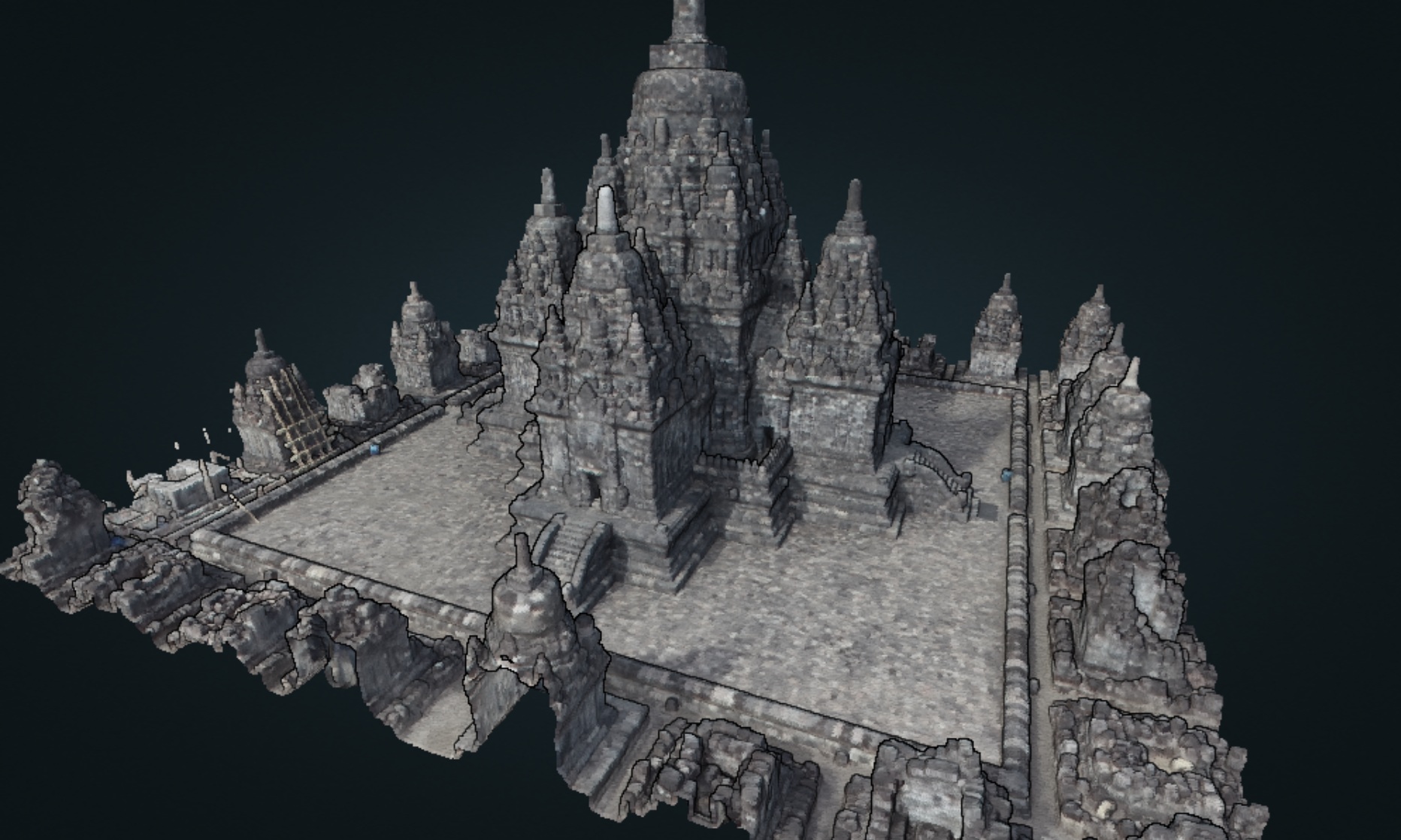
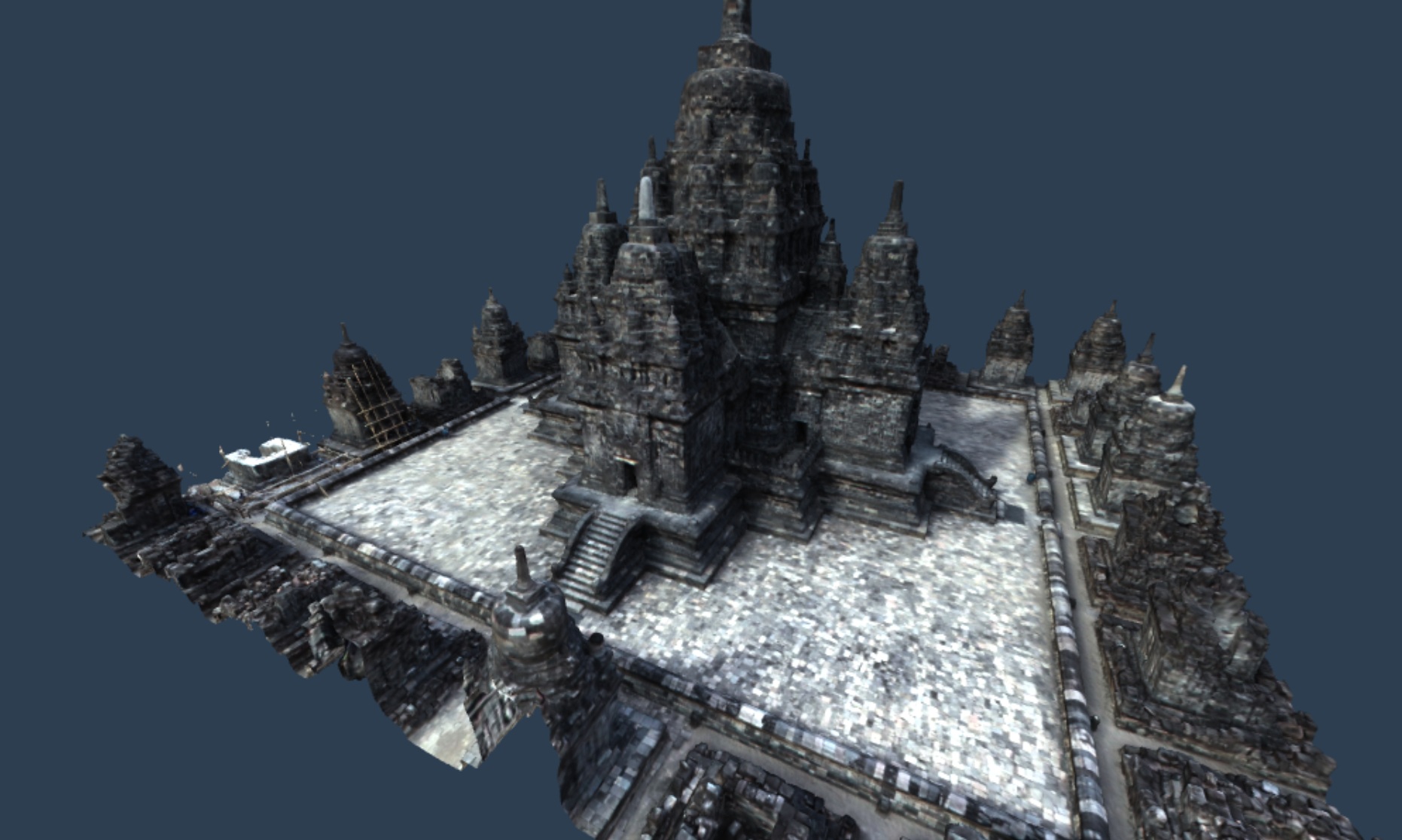
The model of interest in this article was produced during the Digital Heritage Documentation Tropical School organized by INSA Strasbourg in 2019, which took place at Candi Sewu Temple complex near to my hometown, Yogyakarta. We surveyed the main complex using a DJI Phantom 4 RTK, from both nadir and oblique photos. The processing was done back then using Agisoft Metashape. While not particularly razor-sharp, the resulting 3D model demonstrates how photogrammetry can capture substantial detail when surveyed from 80 meters above the ground. The survey encompass the entire complex, which spans an area of 5 hectares. For the purpose of this article, I am focusing the study to the main temple along with a row of smaller temples around it.
In my work on 3D reconstructions, including the photogrammetric model of the Candi Sewu temple complex in Yogyakarta (shown below), I often wrestle with this trade-off. Point clouds let you see everything: cracks, erosion, deformation. But cleaned-up models provide a smoother, clearer, more accessible view for non-specialist audiences. Gaussian splats, on the other hand, provides a lifelike, almost dreamy, visuals of our object of interest. The following shots will guide you to the full-screen interactive visualization of Candi Sewu main temple through different lenses: point cloud, meshed & textured model, and gaussian splats (Still working on this one! Will be updated once complete). As these 3D visualizations are quite resource-hungry, I would recommend opening these on a laptop or desktop computer for better interactivity and viewing.
So which one do we choose?
It depends on the audience, the objective, and the message we want to convey.
Point cloud, both from photogrammetry and laser scanning, provides the most faithful representation of the 3D model in terms of dimension and geometry, when done correctly. The level of detail is of course depending on how we perform the scan or photography. Generally, the closer the sensor, the better the detail. Point clouds are also quite simple in structure, while could be massive, but the amount of computing power required to display and navigate is typically manageable. However, due to its “fluffy” nature, lack of semantic delineation of what’s solid and what’s void, makes it hard for software to deal with it. It’s not easy to make a collission detector in 3D space to enable us to “bump” virtually into objects, and have our movement stopped or restricted by such objects, if the objects are represented as point clouds.
Gaussian splats are a different beast. They build on the same “point-in-space” foundation as traditional point clouds, but with a critical twist: each point is wrapped in a Gaussian blob that mimics light behavior. This subtle addition fools our visual senses, transforming the raw, discrete look of point clouds into something nearly photorealistic, an almost continuous, immersive scene that looks real.
Are we documenting reality? Or are we presenting a curated, idealized version of it? Or maybe we are aiding others to perceive the reality as is? So, which tool to pick? You already know the answer.
This article is a placeholder. In the near future, I’ll be writing a full exploration of this balance between raw fidelity and interpretive modeling. I’ll share examples, workflows, and principles for deciding when to use one approach over the other—and why that decision matters.
Stay tuned.
Tags: #topography#modelling#surface